互动
最近评论
stonewu
YOPO通过Fast-Planner进行控制
stonewu
🥰🥰🥰
stonewu
牛牛牛,棒棒棒,大佬膜拜🫡
stonewu
ONNX对于传统卷积的处理效率应该会更好,由于DAG的限制导致对于双向序列的处理更复杂
标签
寻找感兴趣的领域
Halo
0
主页
0
文章
七月 2025
7
篇
功能
显示模式
集合
足迹
文件夹
留言板
图库
中间站
Github
CSDN
西北大学
教务系统
西北工业大学
标签
Halo
0
主页
0
播放音乐
YSA.NET
分类: 无人机规划
首页
who am I
樂
集合
足迹
文件夹
留言板
图库
中间站
Github
CSDN
西北大学
教务系统
西北工业大学
登录
0
首页
日常
技术分享
无人机规划
实用网站
论文分享
端侧AI
更多
技术分享
论文分享
无人机规划
未读
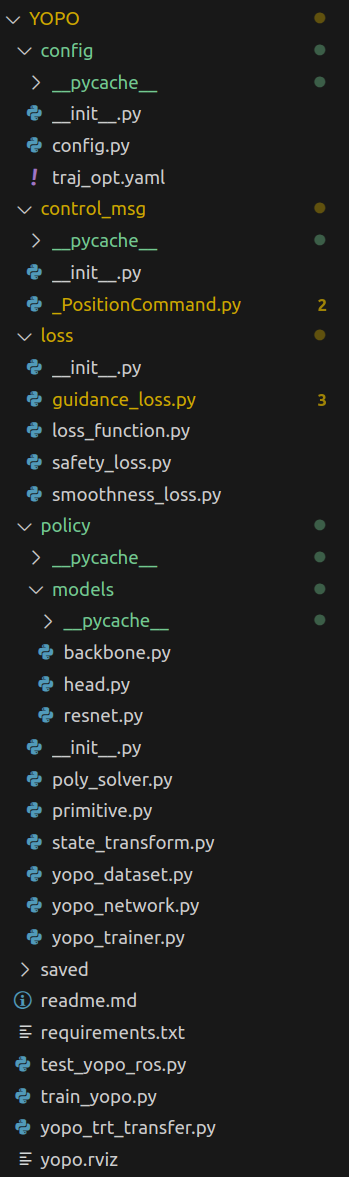
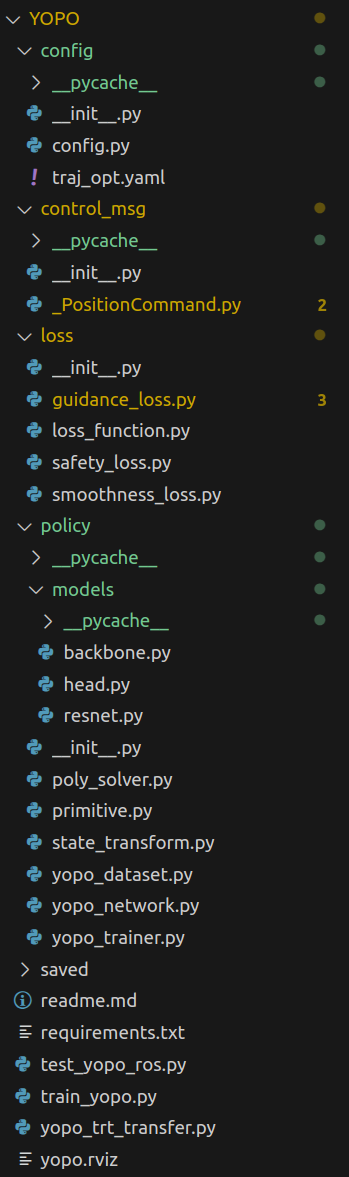
YOPO代码运行及功能解析
简介: 项目地址:https://github.com/TJU-Aerial-Robotics/YOPO YOPO提出了一个基于学习的规划器,用于在障碍密集环境中进行自主导航,将(i)感知和映射,(ii)前端路径搜索和(iii)经典方法的后端优化集成到单个网络中。 Learning-based Pl
2025-07-19
1
你好啊!我是
YSA.NET
西北大学-智能科学与技术
了解更多
文章数 :
7
访问量 :
1094
建站天数 :
2025-07-01
最新评论
YOPO通过Fast-Planner进行控制
YSA /
🥰🥰🥰
zhuhonguu /
牛牛牛,棒棒棒,大佬膜拜🫡
zhuhonguu /
ONNX对于传统卷积的处理效率应该会更好,由于DAG的限制导致对于双向序列的处理更复杂
Songang_Yang /
最近发布
YOPO代码运行及功能解析
2025-07-19 23:15:30
C++编程基础
2025-07-15 15:17:23
全国高校高清校徽
2025-07-12 11:41:00
无人机巡检中的边缘AI识别应用研究
2025-07-08 12:30:45
分类
日常
0
技术分享
4
无人机规划
1
实用网站
1
论文分享
2
端侧AI
4
繁